
El alumnado de Tecnología e Ingeniería de segundo bachillerato realiza unas pruebas con un motor paso a paso controlado por el driver ULN2003 todo ello conectado y controlado mediante una placa de arduino. Estas pruebas van encaminadas a probar la velocidad más idónea y verificar si dicho motor es capaz de mover el sistema reductor de la extrusora de PET cuyas piezas ya están impresas y montadas.
Aquí os dejamos una serie de fotografías y un vídeo de su funcionamiento junto con el programa de arduino que controla dicho montaje.
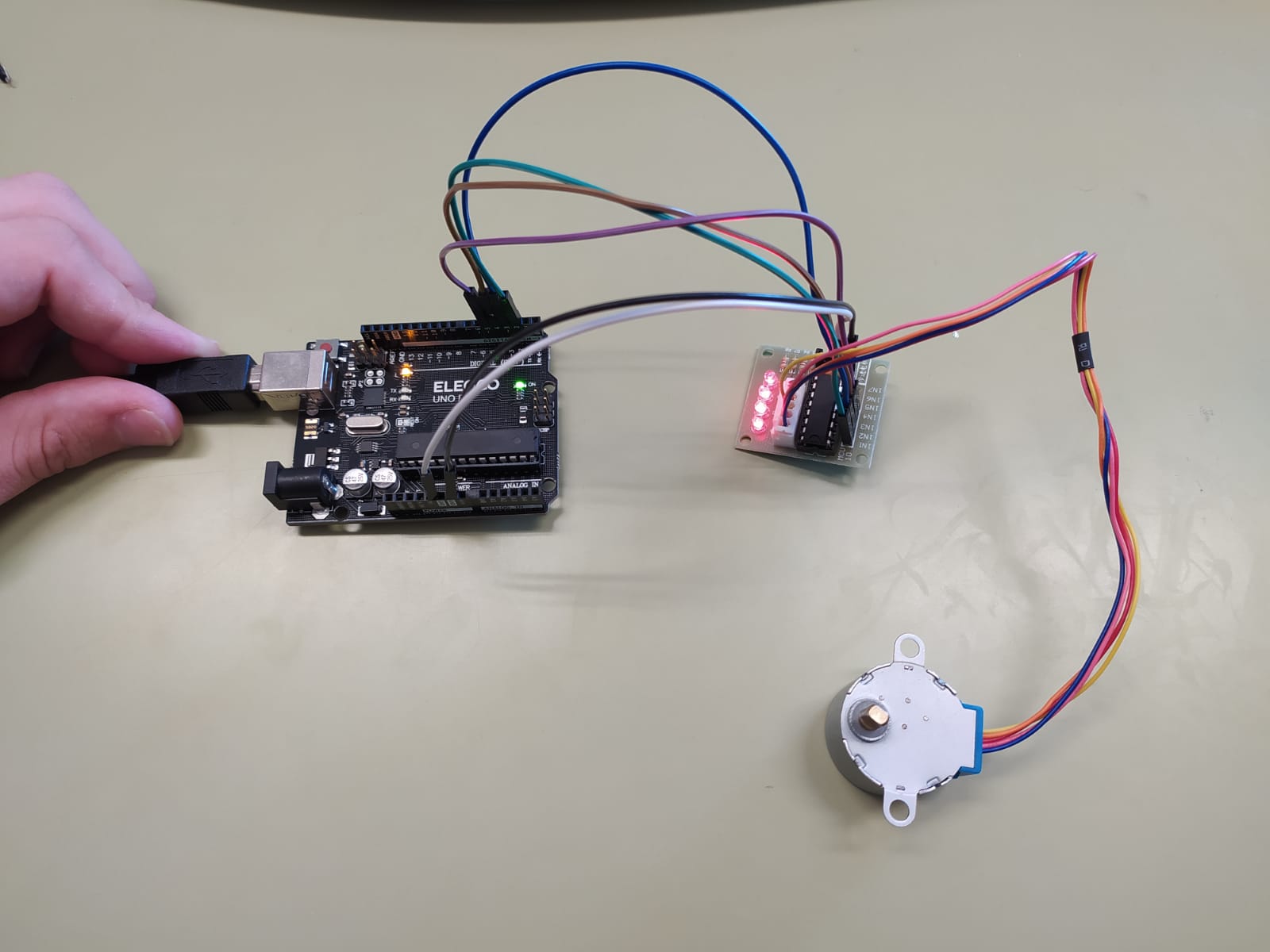
1. Montaje.

2. Programación y carga del programa.
3. Funcionamiento.
PROGRAMA DE ARDUINO


No hay comentarios:
Publicar un comentario