Dron con arduino
La presente evidencia implica al alumnado de 4º de ESO A/B/C quienes cursan la optativa de Tecnología.
Se trata de dar aplicar los conocimientos de robótica e impresión 3D a un proyecto concreto, en este caso para diseñar, construir y programar un dron implementando una placa de arduino con sus correspondientes elementos necesarios para el buen funcionamiento del mismo.
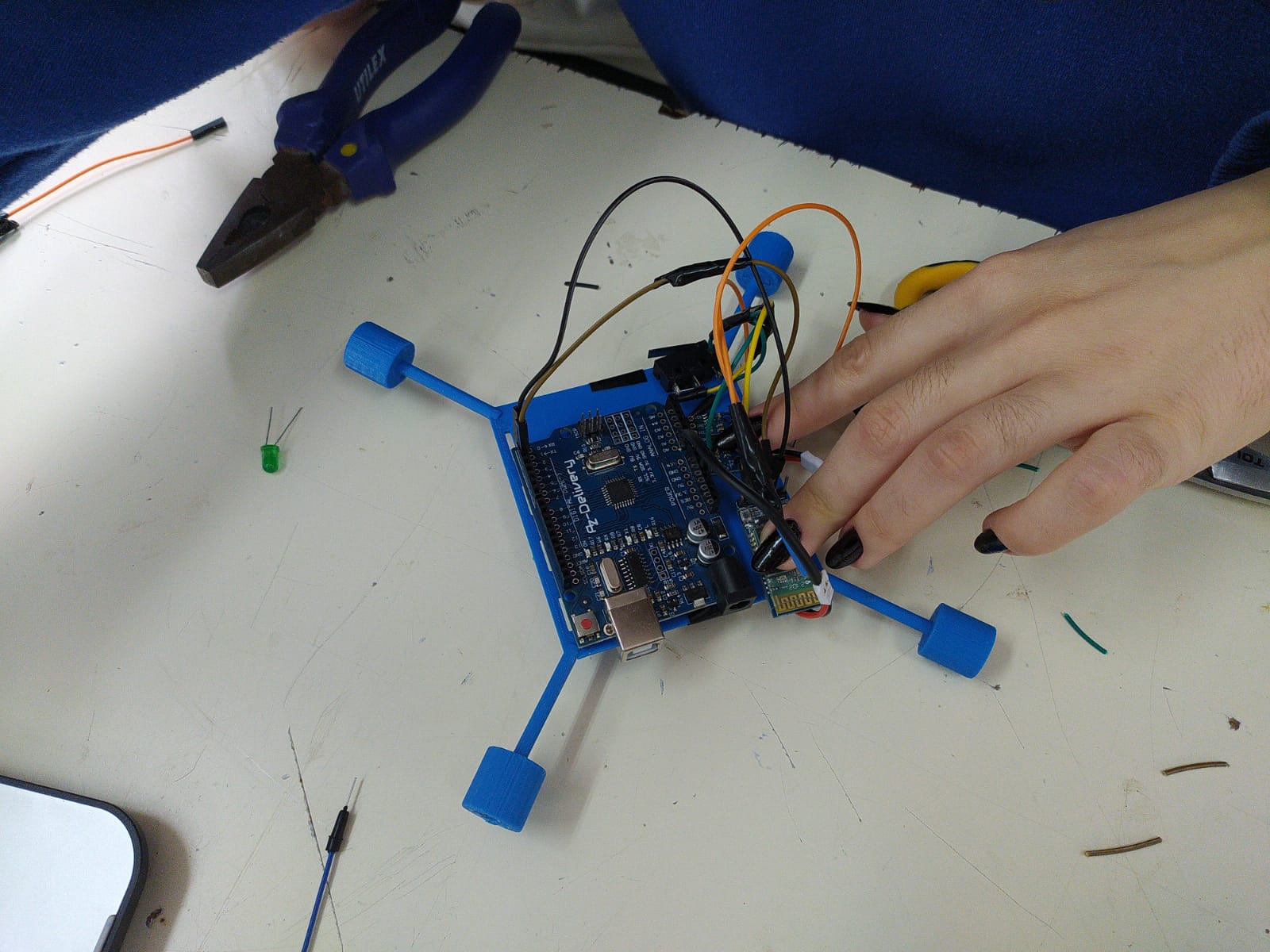
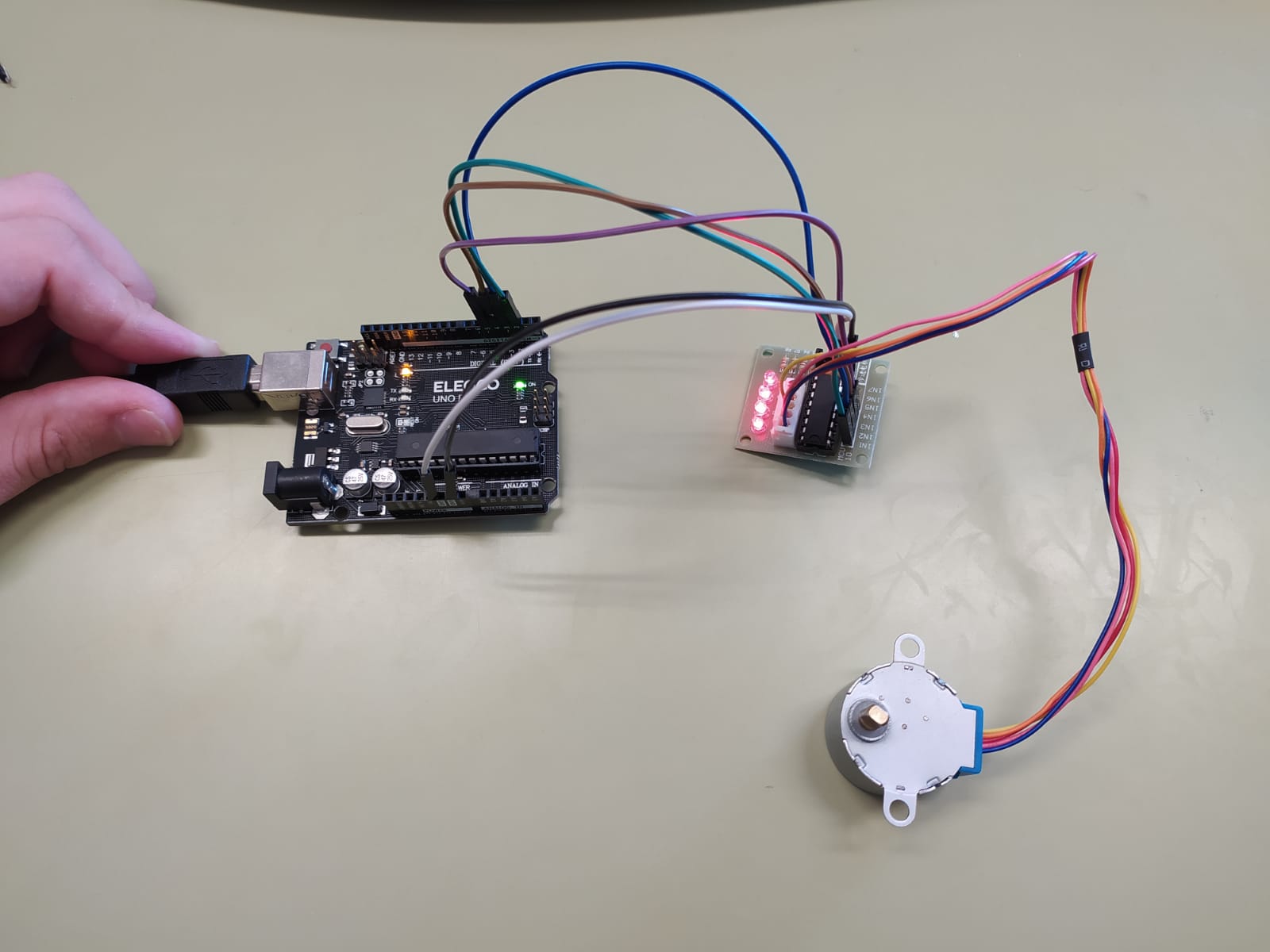
El alumnado comenzó con diseño 3D del mismo teniendo en cuenta los elementos que debían ser instalados, placa de arduino, transistores, diodos, giroscopio, los motores, la placa bluetooth, baterías, etc realizando previamente la disposición de dichos elementos en madera DM.
Para llevar a cabo dicho proyecto se ha necesitado un pc con windows para la carga del programa de la placa, configuración del giroscopio así como para diseñar en 3D el dron para su posterior impresión, estaño y soldador de estaño, pegamento cianocrilato, cableado, etc. Además se ha utilizado la impresora 3D para la impresión en una sola pieza del chásis del dron dónde se han montado todos sus elementos.
Tuvimos algunos problemas técnicos principalmente en la soldadura de algunos elementos debido al material de algunos cables utilizados que debieron ser sustituidos así como en la configuración del giroscopio debido principalmente a la versión del software necesario para ello.
En cuanto a los elementos multimedia utilizados, básicamente son el ordenador portátil, sketchup, IDE de arduino y la pizarra digital.
En cuanto a la temporalización indicar que el tiempo aproximado de preparación del proyecto en varias fases nos ha llevado aproximadamente 6 sesiones siendo tiempo de ejecución de la misma en tiempo de unas 98 horas/sesiones de clase.
Es una actividad concreta de un proyecto final dentro del bloque de programación mediante la participación en robo-reto, en concreto en la modalidad de invent-reto.
En cuanto a los aspectos de mejora, una vez hemos podido adquirir el pc con windows, gracias al programa CITE Steam que llevamos a cabo, ha facilitado enormemente el trabajo ya que se ha podido llevar realizar todo el trabajo de configuración y puesta en marcha en el aula y lo más importante realizado por el alumnado que es de lo que se trata.
La evidencia se basa en el trabajo realizado con el alumnado encaminado a conseguir los objetivos del proyecto: se trata de que el alumnado vea las posibilidades que ofrece la programación de dispositivos mediante lenguajes de programación basado en arduino, el diseño 3D y todas las herramientas puestas al alcance de todo el alumnado, permitiendo así la implementación de la robótica en proyectos dando un paso más, es decir, que no sea el mero hecho de programar un robot, realizar un videojuego en Scratch, etc.
La evidencia implica el uso de la tecnología en su pleno significado con el alumnado: diseño 3D, gestión de ficheros en diferentes plataformas (classroom, eScholarium, sketchup, arduino...) manejo del PC, aprendiendo a interconectar diferentes elementos de hardware con el pc, drivers, etc.
La evidencia promueve el aprendizaje competencial haciendo uso de metodologías activas. Se les propone la actividad, se les da cómo funciona cada uno de los elementos que conforman el proyecto y se les va guiando a lo largo del proceso de realización del mismo. Ellos van demandando lo que van necesitando en función de sus necesidades. Leen lo que se les pide, se les explica, debiendo ir sacando los datos e ideas para realizar el programa. Piensan el algoritmo teniendo en cuenta cada uno de los elementos y siguiendo circuitos tipo que poco a poco van desarrollando.
La evidencia desarrolla dinámicas de trabajo colaborativo y cooperación entre los alumnos, con adaptación a diferentes ritmos de aprendizaje y dependiendo del proyecto. Éste lo llevan a cabo tres alumnas a la par que otros alumnos del grupo llevan a cabo sus correspondientes proyectos.Trabajan por grupos de 3 y se suelen ayudar entre grupos.
La forma de trabajar con este tipo de equipos la solemos realizar de este modo haciendo que el alumnado sea lo más autónomo posible tomando la iniciativa para la resolución de las actividades propuestas.
Aquí os dejamos algunas imágenes del proceso de construcción del dron a la espera de hacer la programación y pruebas de vuelo.






.jpeg)
.jpeg)


.jpeg)










.jpeg)
.jpeg)
.jpeg)




